All Projects
Explore our variety of creative microcontroller projects for all levels, ready to build with parts from our range
Have your own project idea?
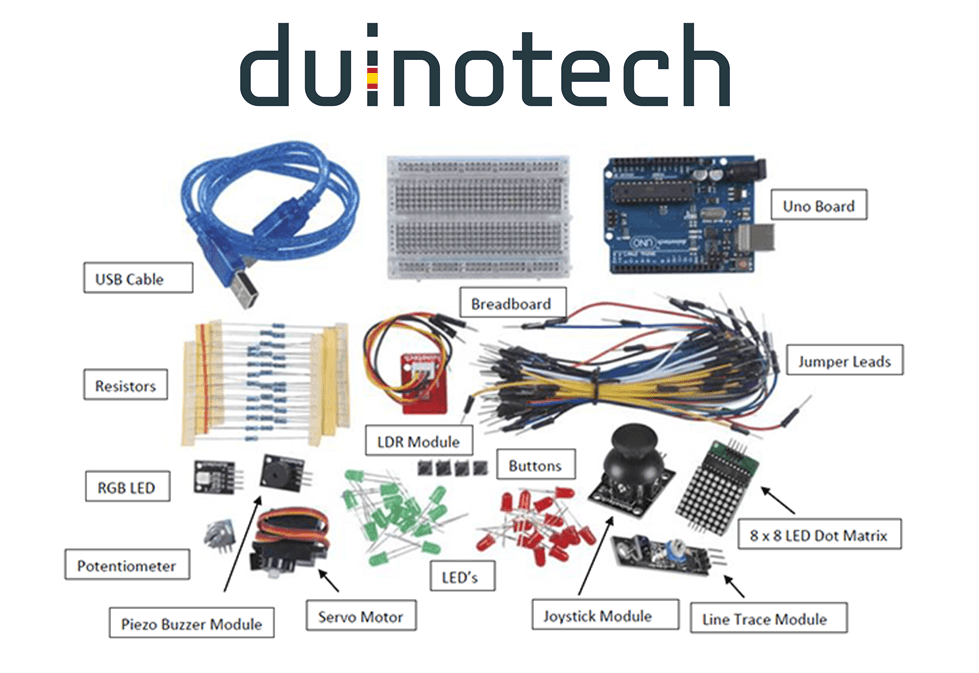
New to microcontroller projects? Our XC3900 Duinotech Learning Kit has everything you need to get started with Arduino.
.png%3Fbranch%3Dprod&w=1080&q=75)
This project is all about creating a simple game to test your memory.

Let the power of the sun encourage you to get out of bed each morning with this curtain/blinds opener.

Here’s a little project that isn’t hard to build, but really has unlimited uses.
.jpg%3Fbranch%3Dprod&w=1080&q=75)
Looking for a new conversation starter in your home? Build our Game of Life wall thermostat using new XC4390 addressable RGB light strip.

Due to overwhelming demand we've introduced an electronics enthusiast essential - everything you need to explore the intricacies of blown fuses!
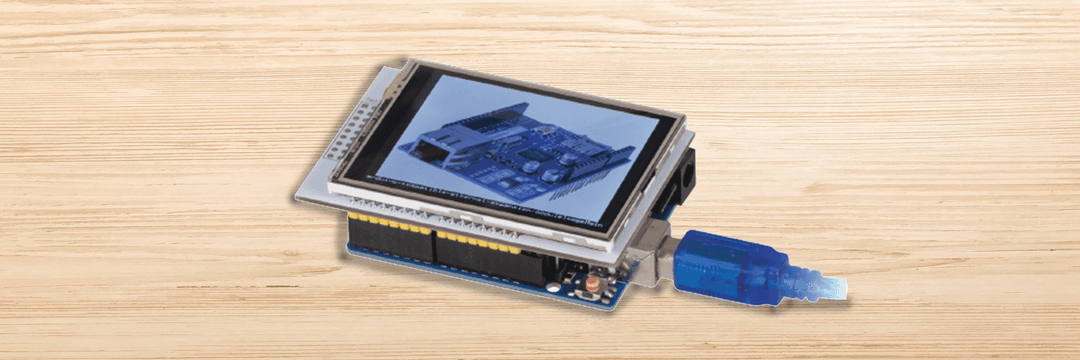
There's not a lot to construct in this project - it's just an UNO and LCD Touch Shield, but if you want a simple project that looks slick then it's a good place to start.
.jpg%3Fbranch%3Dprod&w=1080&q=75)
Pump up the Jam with this beat bar! Get a visual display that bounces in tune with the music.
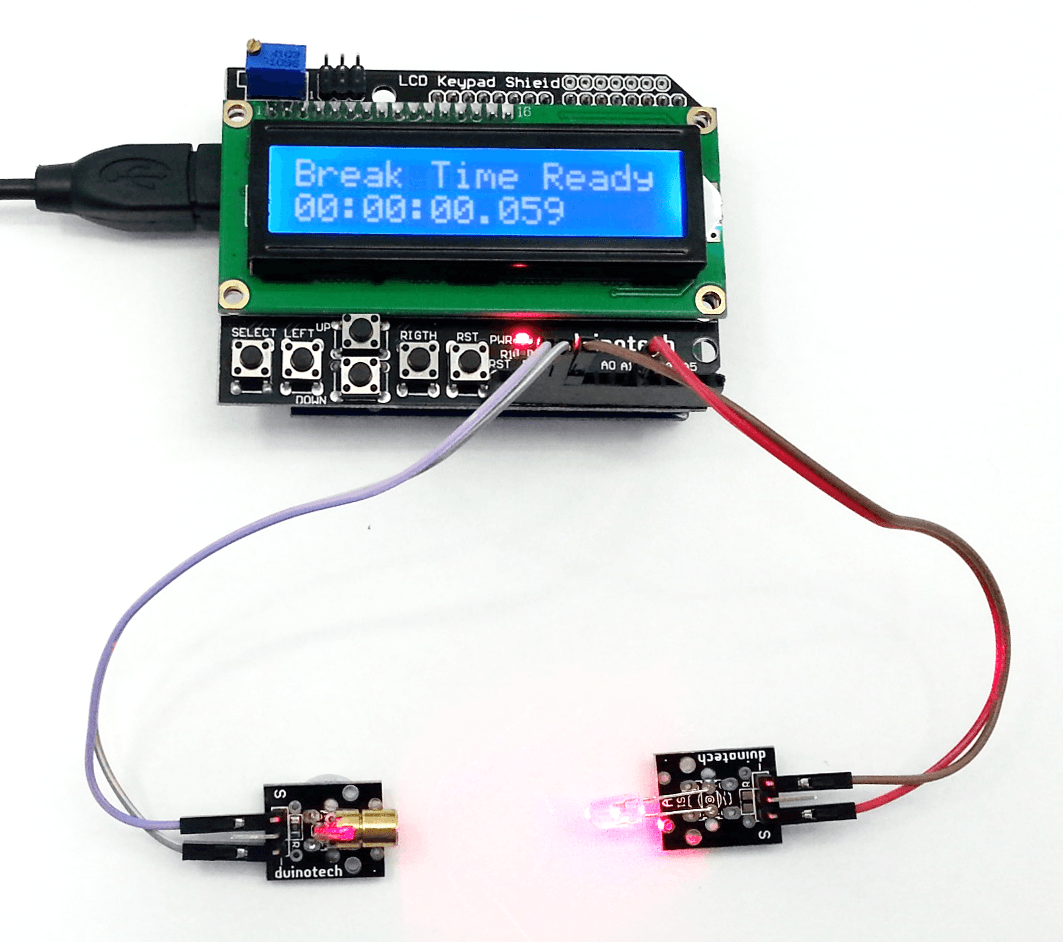
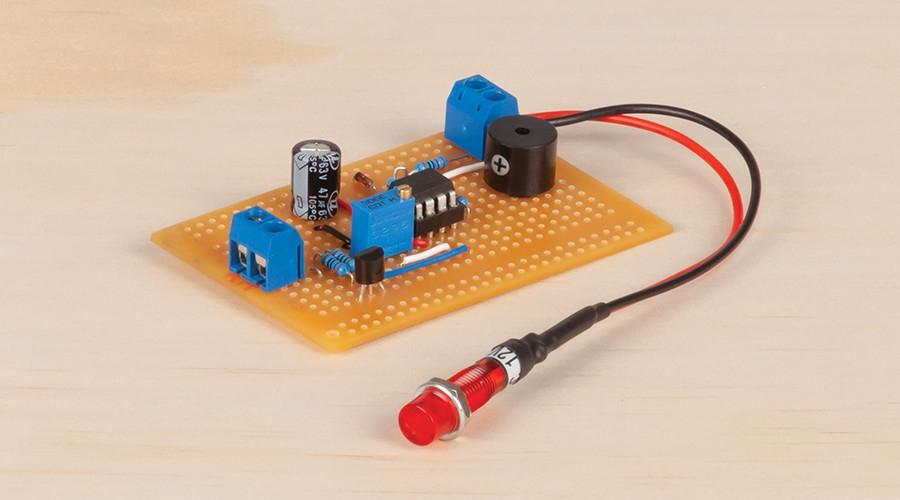
Here's a handy little project that uses a little known feature of LEDs, and also has a laser in it, which makes it even cooler.
Arduino® is an open source hardware and software prototyping environment, but what does this mean?

This is a great little tool for the green thumbs.
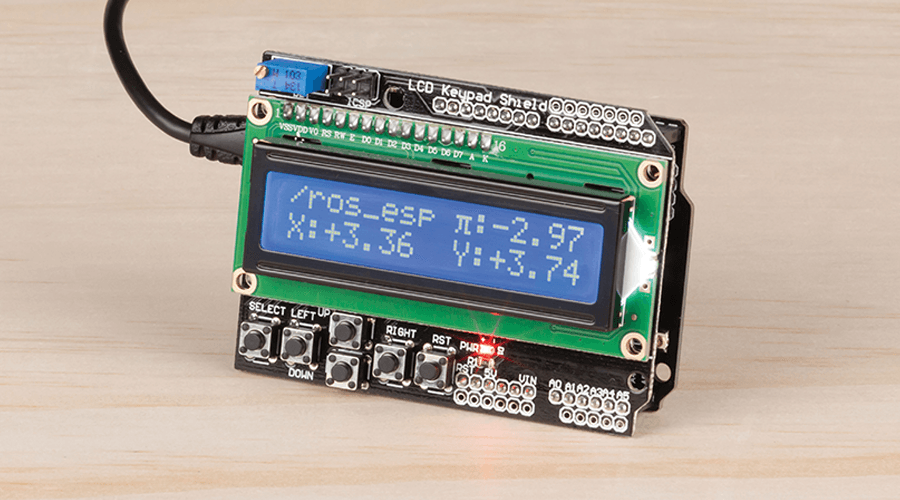
Control your ROS projects with a simple to build controller
.jpg%3Fbranch%3Dprod&w=1080&q=75)
Get started with the Microbit starter pack and this neat little game!
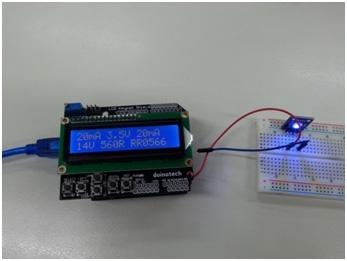
In this project we built a current meter using the AC712 current sensor, instead of just displaying or reporting current measurements we made the project a little more interesting by calculating power consumption (which is just POWER = CURRENT x VOLTAGE), and reporting the power consumption via email.

Combine a micro:bit XC4320 and breakout board XC4330 to create an electronic christmas tree using up to 12 LEDs and your own imagination.
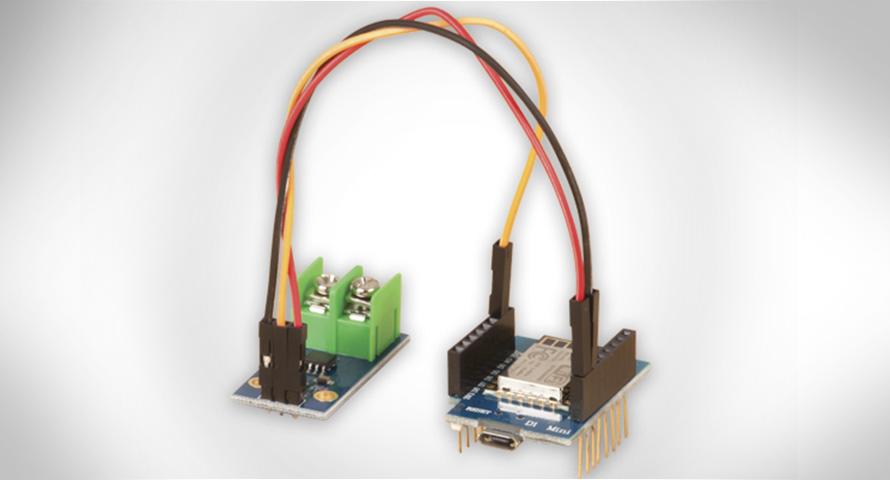
Many off-the-shelf modules have header pins that can be difficult to work with, whether they are facing the right way or are the wrong configuration (vertical instead of horizontal, vice versa.)

We saw a version of this project in The Shed Magazine, and thought it would be perfect to build using our duinotech parts.
.jpg%3Fbranch%3Dprod&w=1080&q=75)
This clever robot is the perfect way to get started with robotics.
A handy little tool that can help you out if you work with LED’s a lot, especially if you are always trying to work out the right resistor to make them work.